During November in 1664, a frigate sailing from Algeria sank off the coast of France, pulling hundreds to their frigid end 100 metres below, where the ship would remain, untouched by even experienced divers. It took Oussama Khatib, a Stanford computer science professor, to plumb the depths and explore the La Lune, recording the wreck and lifting from it treasure: a small vase that marks an important breakthrough in ocean exploration. Khatib, for his part in the expedition, needed only to sit on the boat while he saw, navigated and even felt the ship’s intricacies while arms below interpreted his motion.
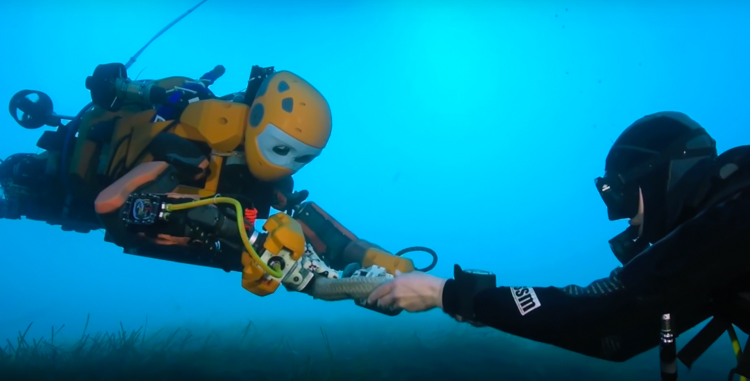
Khatib was controlling OceanOne, a five-foot tall humanoid robot flanked with eight thrusters that adjust against the shifting water automatically. Its two “fully articulated arms” come with sensors that lend Khatib haptic feedback above, so he can feel what the robot feels. When the robot hit a snag, its two arms pushed itself free.
A robot that can explore dangerous areas without tiring or being bored means a leap in underwater exploration. Previous underwater ROVs tend to resemble boxes while OceanOne’s nimble humanoid form can navigate more ably. This video shows the new prototype in action: